Applied Sciences, Free Full-Text
4.5 (330) In stock
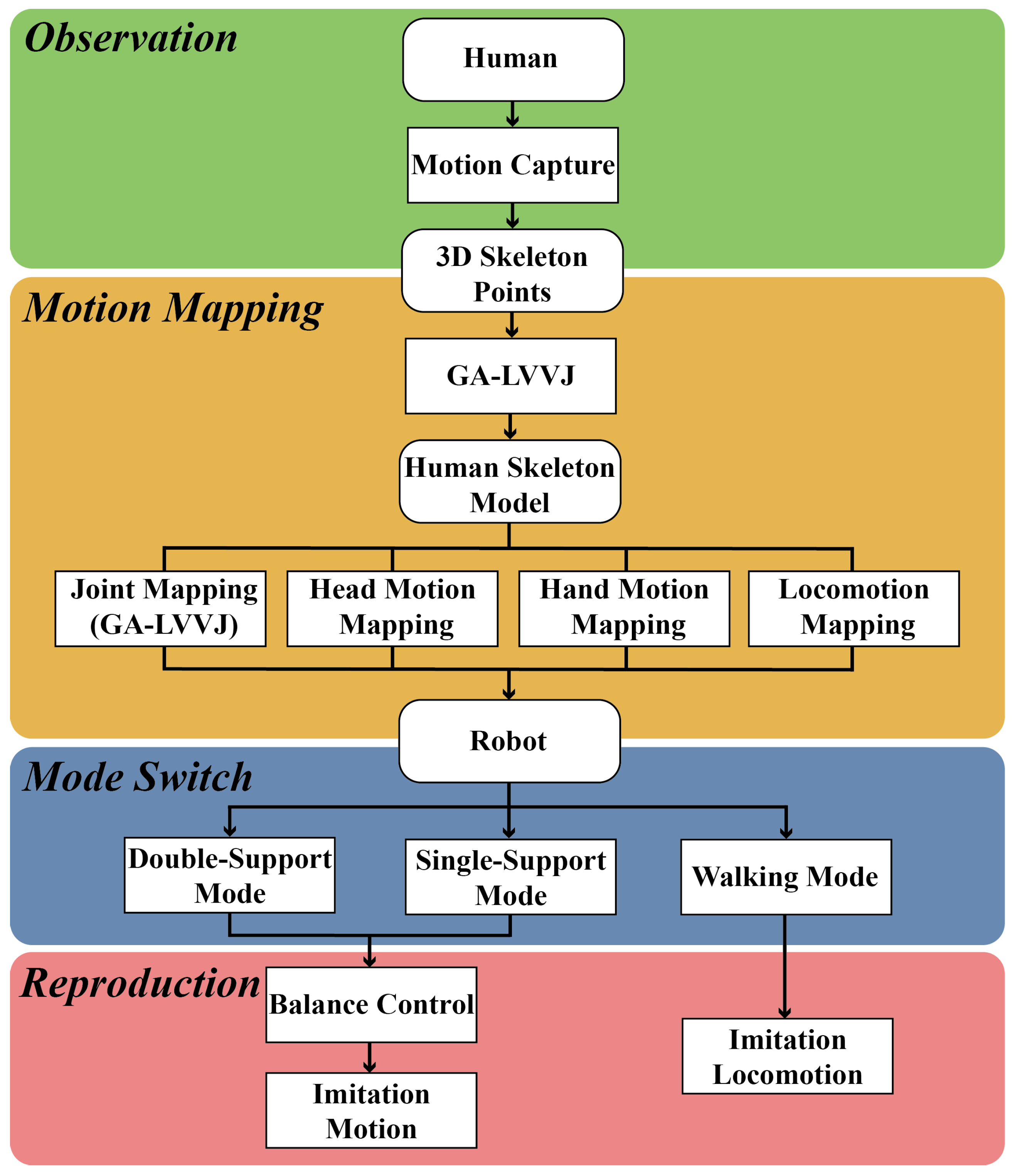
Due to the limitations on the capabilities of current robots regarding task learning and performance, imitation is an efficient social learning approach that endows a robot with the ability to transmit and reproduce human postures, actions, behaviors, etc., as a human does. Stable whole-body imitation and task-oriented teleoperation via imitation are challenging issues. In this paper, a novel comprehensive and unrestricted real-time whole-body imitation system for humanoid robots is designed and developed. To map human motions to a robot, an analytical method called geometrical analysis based on link vectors and virtual joints (GA-LVVJ) is proposed. In addition, a real-time locomotion method is employed to realize a natural mode of operation. To achieve safe mode switching, a filter strategy is proposed. Then, two quantitative vector-set-based methods of similarity evaluation focusing on the whole body and local links, called the Whole-Body-Focused (WBF) method and the Local-Link-Focused (LLF) method, respectively, are proposed and compared. Two experiments conducted to verify the effectiveness of the proposed methods and system are reported. Specifically, the first experiment validates the good stability and similarity features of our system, and the second experiment verifies the effectiveness with which complicated tasks can be executed. At last, an imitation learning mechanism in which the joint angles of demonstrators are mapped by GA-LVVJ is presented and developed to extend the proposed system.
Applied Sciences, Free Full-Text, press f to pay respect significado
Applied Sciences, Free Full-Text, press fit

Applied Sciences, Free Full-Text

3M Honors Full Consortium Grant Despite Pandemic, Demonstrating the True Meaning of Partnership - The Consortium
Applied Sciences, Free Full-Text, Emulsion
Applied Sciences, Free Full-Text, arras io sandbox commands

Applied Sciences, Free Full-Text, g1 f1500 e0
Applied Sciences, Free Full-Text, groups moodle ufsc
Applied Sciences, Free Full-Text, Synthetic Dye

Applications are open for #ComSciCon24, the communicating science workshop for graduate students, to be held 24-24 July in Boston. Submit
Applied Sciences, Free Full-Text, g1 f1800

Applied Sciences, Free Full-Text, driving simulator 2009

Applied Sciences An Open Access Journal from MDPI
Normal gait Musculoskeletal Key
Dual Pipe Support For Rooftop Pipe Systems- PSE - 2-2
One gait cycle, or stride, is defined as two consecutive heel strikes
 Dragon Fit Compression Yoga Pants Power Stretch Workout Leggings
Dragon Fit Compression Yoga Pants Power Stretch Workout Leggings MASCOT COSTUME BIGGYMONKEY™ of the cat Hello Kitty dressed in pink
MASCOT COSTUME BIGGYMONKEY™ of the cat Hello Kitty dressed in pink- Euro Hockey League - HC Bra landed the Italian men's title for the ninth time in 15 years as they won a final shoot-out against Tevere.
 Buy MYZAWomen's Sexy Lace G-String/T String/Thong Bikini Panty Online at desertcartSeychelles
Buy MYZAWomen's Sexy Lace G-String/T String/Thong Bikini Panty Online at desertcartSeychelles Wireless 1 Gang Switch (white finish), Installation-Easy, Battery
Wireless 1 Gang Switch (white finish), Installation-Easy, Battery SDCVRE Pantalones de Yoga Leggings de Fitness para Mujer, Legging
SDCVRE Pantalones de Yoga Leggings de Fitness para Mujer, Legging
