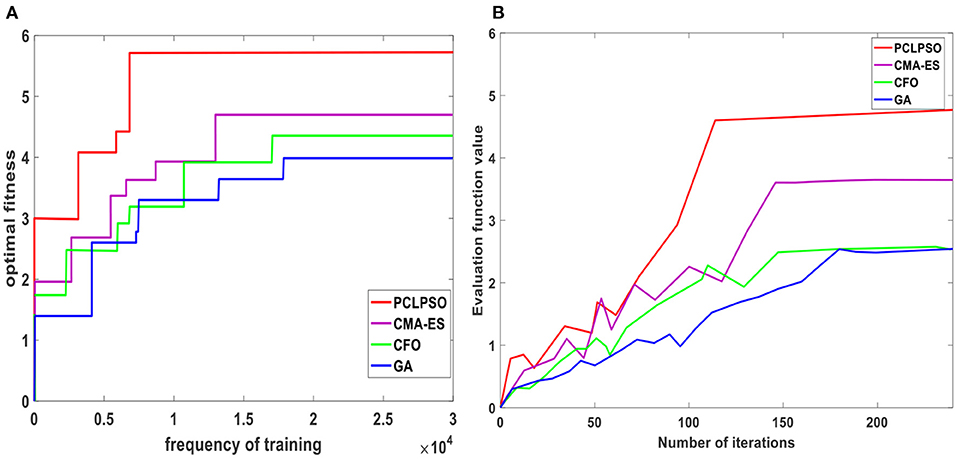
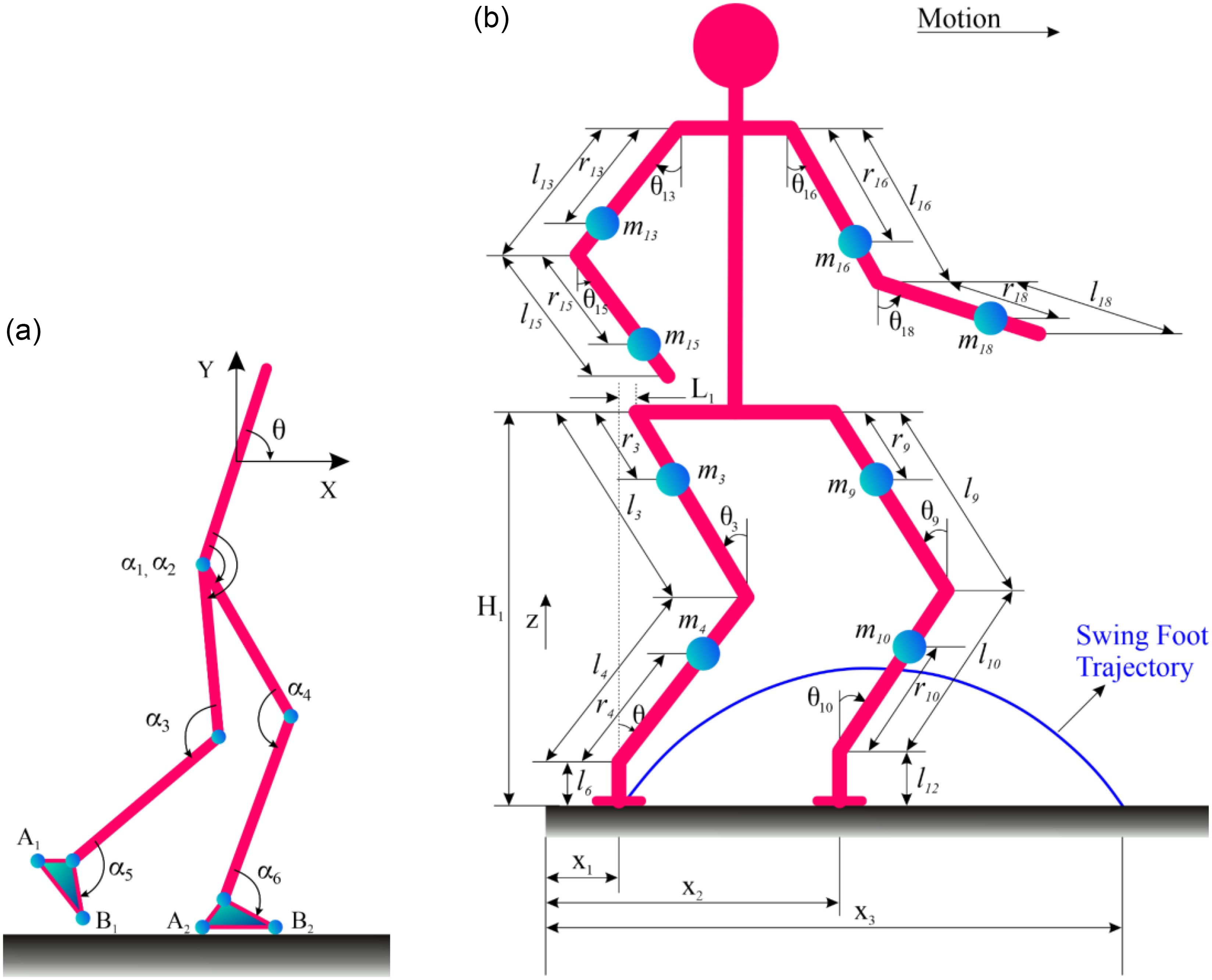
Frontiers Gait Optimization Method for Humanoid Robots Based on Parallel Comprehensive Learning Particle Swarm Optimizer Algorithm
5 (470) In stock

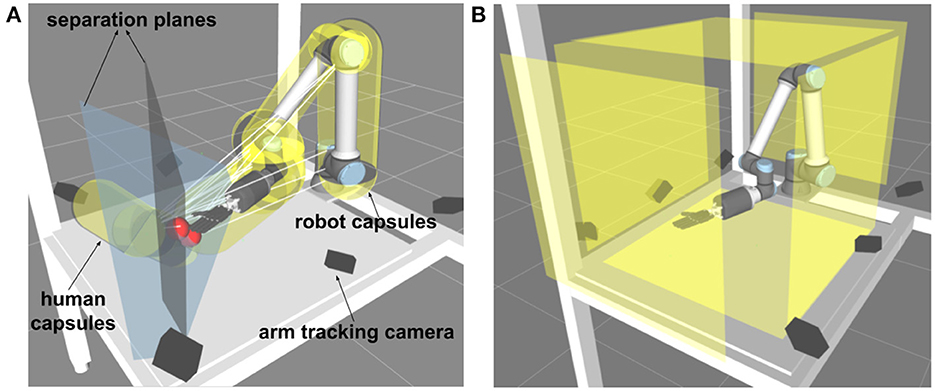
Frontiers Coordinating human-robot collaboration by EEG-based
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on

CPG-Based Gait Generation of the Curved-Leg Hexapod Robot with

Chunguang Li's research works Changzhou Institute of Technology
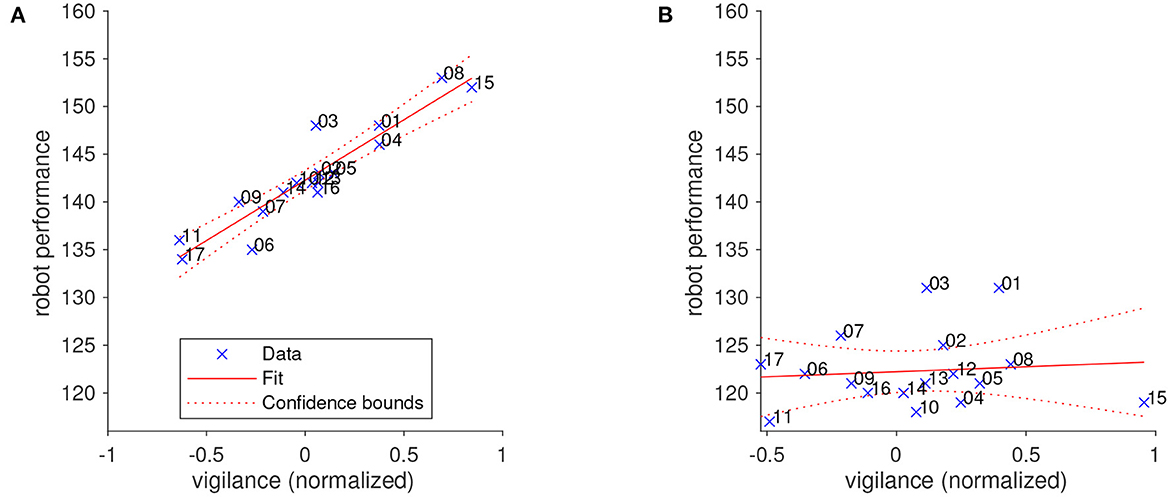
Frontiers Coordinating human-robot collaboration by EEG-based

Using bilateral symmetry of the biped robot mechanism for

Particle Swarm Optimization aided PID gait controller design for a
A review on gait generation of the biped robot on various terrains

PDF) Gait Optimization Method for Humanoid Robots Based on
The gait cycle has two phases: about 60-percent stance phase and
Kenjya-no-shokutaku Double Support
 1940s Pants For Women
1940s Pants For Women Plus Size Line Print Long Sleeve Bodycon Maxi Dress, Women's Plus Medium Stretch Sexy Dress
Plus Size Line Print Long Sleeve Bodycon Maxi Dress, Women's Plus Medium Stretch Sexy Dress Women's Leggings Small Naturyl By NBK Niykee Heaton Peach The Fit
Women's Leggings Small Naturyl By NBK Niykee Heaton Peach The Fit Sport legging with contrast fabric Black, Mexx
Sport legging with contrast fabric Black, Mexx IVIVVA {Lululemon} Girls Blue Racerback Vented Racerback Dress Size 14
IVIVVA {Lululemon} Girls Blue Racerback Vented Racerback Dress Size 14 NIKE Sportswear Essential High-Waisted Logo Leggings CZ8528 272 - Shiekh
NIKE Sportswear Essential High-Waisted Logo Leggings CZ8528 272 - Shiekh